最近全然手がついていないけどRoboCarも作ってます.
センサはまだPSD距離センサ×4しかついていませんが,USBカメラ等もつけてSLAMを実装できたらと思っています.

Fig.1 Robocar
Fig.4,Fig.5のようにアッカーマンリンク機構を採用し,旋回中心が一致するようにしています.

Fig.2 通常の4節リンク機構

Fig.3 通常の4節リンク機構での旋回
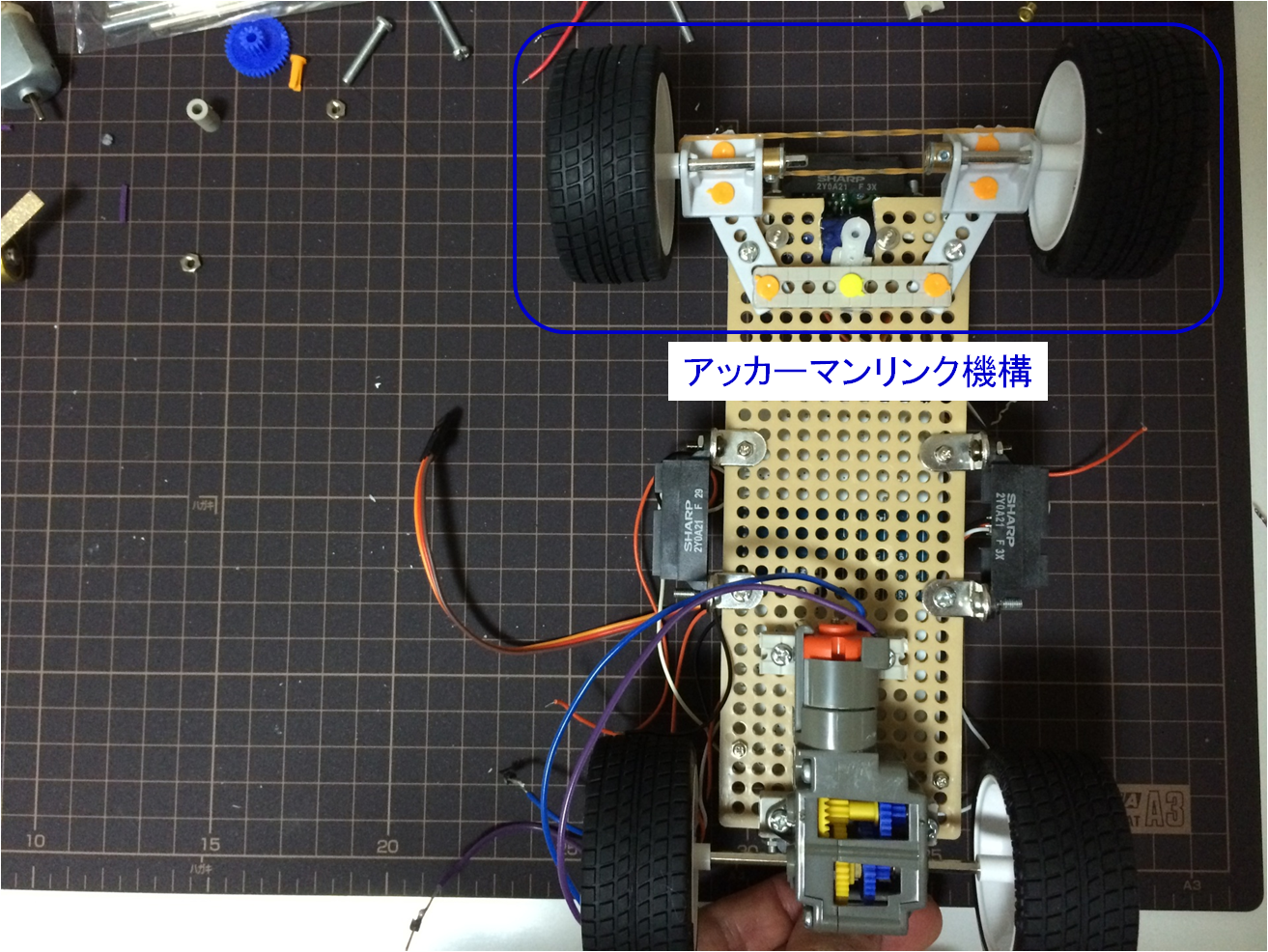
Fig.4 アッカーマンリンク機構

Fig.5 アッカーマンリンク機構での旋回
最終的にはE4駆にしてみたいなぁ~


